

Controlando Motores de Passo com Arduino: Codigo Exemplo Para Ligar Um Motor De Passo No Arduino
Codigo Exemplo Para Ligar Um Motor De Passo No Arduino – Este artigo apresenta um guia prático para controlar motores de passo utilizando a plataforma Arduino. Abordaremos desde os conceitos básicos de funcionamento até a implementação de códigos exemplos para diferentes níveis de controle, incluindo rotação simples, controle de direção e controle de posição. Aprenderemos a utilizar bibliotecas Arduino e a lidar com aspectos importantes como alimentação e drivers.
Arquitetura Básica de Motores de Passo e Funcionamento de Drivers
Motores de passo são atuadores que convertem pulsos elétricos em movimentos rotacionais discretos. Sua arquitetura interna é composta por um conjunto de eletroímãs e um rotor, permitindo um controle preciso da posição angular. O driver de motor de passo atua como um interface entre o microcontrolador (Arduino) e o motor, amplificando a corrente e gerenciando a sequência de energização dos eletroímãs para produzir o movimento desejado.
Existem diversos tipos de drivers, como os drivers L293D, A4988, DRV8825, cada um com suas características e capacidades de corrente.
Componentes Necessários
Para conectar um motor de passo ao Arduino, você precisará dos seguintes componentes:
- Arduino (Uno, Mega, Nano, etc.)
- Motor de Passo
- Driver de Motor de Passo (ex: A4988, DRV8825)
- Fonte de Alimentação (para o Arduino e o motor – atenção à corrente necessária!)
- Jumper Wires
- Protoboard (opcional, mas recomendado)
Tipos de Motores de Passo
Existem diferentes tipos de motores de passo, cada um com características específicas que influenciam a escolha para uma aplicação particular. A tabela a seguir resume alguns dos tipos mais comuns:
| Tipo | Características | Vantagens | Desvantagens |
|---|---|---|---|
| Motor de Passo Unipolar | Requer menos fios, mais simples de controlar. | Simples, custo baixo. | Menor torque que os bipolares. |
| Motor de Passo Bipolar | Requer mais fios, maior torque. | Maior torque, mais preciso. | Mais complexo de controlar. |
| Motor de Passo de Alta Resolução | Mais passos por rotação, maior precisão. | Alta precisão, movimento suave. | Custo mais elevado. |
| Motor de Passo Nema 17 | Tamanho e torque comuns em diversas aplicações. | Boa relação custo-benefício, ampla disponibilidade. | Torque limitado em comparação com motores maiores. |
Bibliotecas Arduino para Motores de Passo: AccelStepper e Stepper
O Arduino oferece duas bibliotecas principais para controlar motores de passo: AccelStepper e Stepper. AccelStepper oferece funcionalidades mais avançadas, como aceleração e desaceleração controladas, enquanto a biblioteca Stepper é mais simples e adequada para aplicações básicas.
Instalação e Configuração da AccelStepper
A instalação da biblioteca AccelStepper geralmente é feita através do gerenciador de bibliotecas do Arduino IDE. Procure por “AccelStepper” e instale a biblioteca de Mike McCauley. A configuração envolve a inclusão da biblioteca no código e a definição dos pinos do Arduino conectados ao driver.
Inclusão da Biblioteca Stepper
A biblioteca Stepper é geralmente incluída diretamente no código, sem necessidade de instalação adicional. Sua configuração envolve a especificação dos pinos do Arduino conectados ao driver e o número de passos por revolução do motor.
Exemplo de Código com a Biblioteca Stepper
Este exemplo demonstra a rotação básica de um motor de passo usando a biblioteca Stepper:
#include <Stepper.h>
const int stepsPerRevolution = 200; // Número de passos por revolução do motor
const int motorPin1 = 8;
const int motorPin2 = 9;
const int motorPin3 = 10;
const int motorPin4 = 11;
Stepper myStepper(stepsPerRevolution, motorPin1, motorPin3, motorPin2, motorPin4);
void setup()
myStepper.setSpeed(60); // Define a velocidade em RPM
void loop()
myStepper.step(stepsPerRevolution); // Gira o motor uma volta completa
delay(1000);
Código Exemplo: Rotação Simples, Codigo Exemplo Para Ligar Um Motor De Passo No Arduino

Este código gira o motor de passo em um único sentido:
// Código semelhante ao exemplo anterior, focando na simplicidade da rotação.
Cada linha de código define parâmetros como o número de passos por revolução, os pinos do motor e a velocidade. A função step() executa o número de passos especificado. A velocidade é definida em RPM (rotações por minuto) utilizando setSpeed().
Código Exemplo: Rotação com Controle de Direção
Para controlar a direção de rotação, podemos usar a função step() com valores positivos (horário) e negativos (anti-horário).
- Um botão para girar no sentido horário.
- Um botão para girar no sentido anti-horário.
- Um botão de parada de emergência que desativa o motor.
A implementação envolve o mapeamento dos estados dos botões para comandos de rotação e a inclusão de uma condição de parada de emergência no loop principal.
Código Exemplo: Controle de Posição
Controlar a posição do motor requer calcular o número de passos necessários para atingir a posição desejada. O código deve incluir uma variável para rastrear a posição atual e executar a quantidade correta de passos para atingir a posição alvo. Lidar com erros de posicionamento pode envolver o uso de sensores ou algoritmos de correção.
Aplicações práticas incluem posicionamento preciso em impressoras 3D, máquinas CNC, robótica e automação industrial.
Considerações Adicionais: Alimentação e Drivers
A escolha da fonte de alimentação é crucial. O motor e o driver necessitam de tensões e correntes adequadas. Utilizar uma fonte inadequada pode danificar os componentes. Drivers como o A4988 e o DRV8825 oferecem diferentes níveis de corrente e recursos, como microstepping para maior precisão.
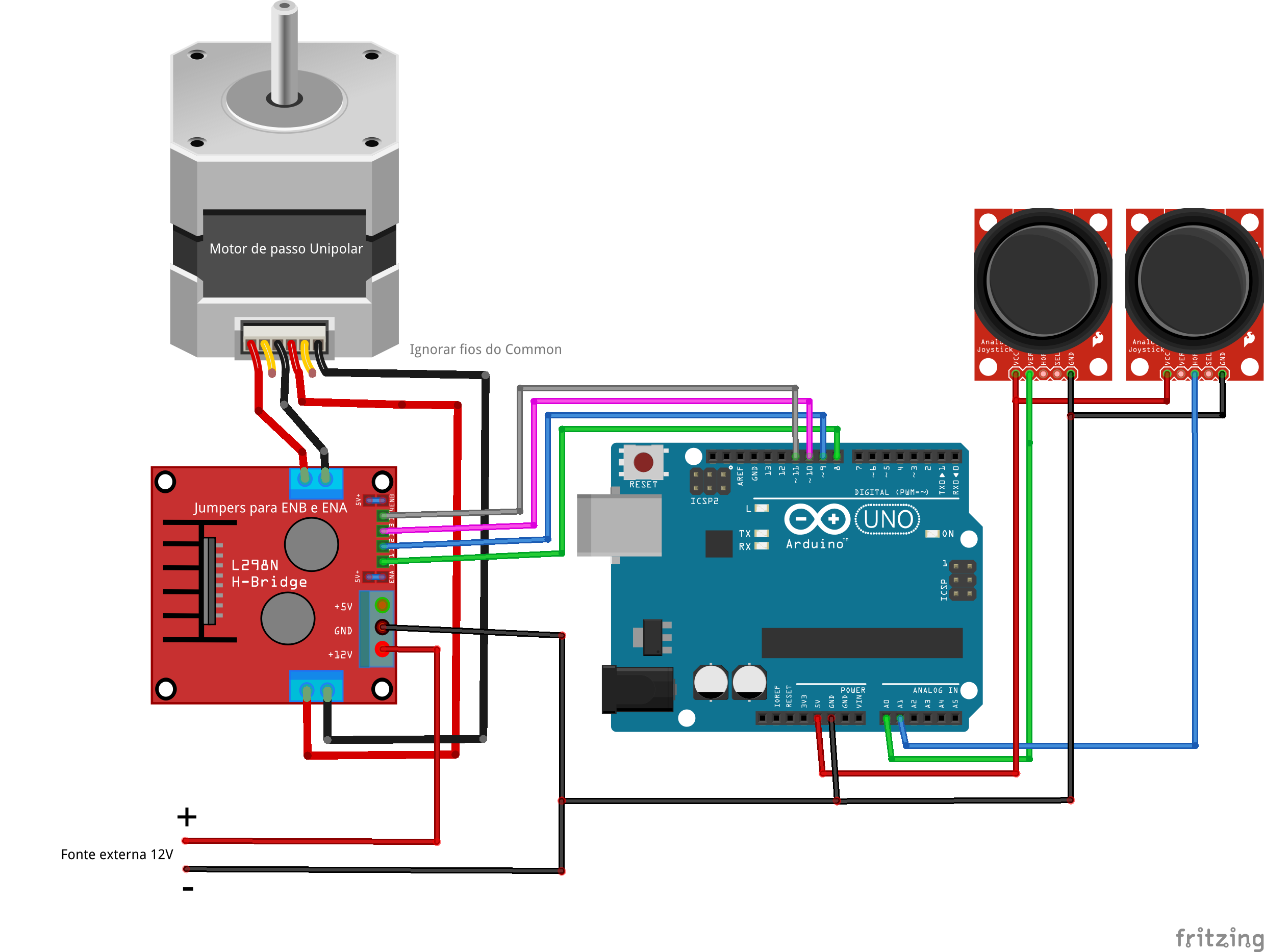
Um diagrama de ligação detalhado é essencial para conectar corretamente o driver ao Arduino e ao motor. É importante respeitar as conexões de tensão e terra, bem como as conexões de controle.
Recursos Adicionais e Soluções de Problemas
Diversos tutoriais e documentações online oferecem informações adicionais sobre motores de passo e Arduino. Problemas comuns incluem conexões incorretas, código com erros e problemas de alimentação. A depuração envolve a verificação de conexões, a inspeção do código e o monitoramento das tensões e correntes.
A calibração do motor é fundamental para garantir a precisão do movimento. Verifique se o número de passos por revolução está corretamente definido para o seu motor específico.
Controlar um motor de passo via Arduino, embora pareça complexo inicialmente, torna-se acessível com a abordagem correta. Este guia forneceu um caminho claro, desde os conceitos básicos até exemplos de código detalhados e prontos para uso. Lembre-se que a prática é fundamental: experimente, adapte os códigos aos seus projetos e, principalmente, divirta-se no processo de construção e aprendizado.
A precisão e o controle que os motores de passo oferecem abrem um leque enorme de possibilidades criativas. Com este conhecimento em mãos, você está pronto para transformar ideias em realidade, criando projetos inovadores e surpreendentes. Boa construção!